Researchers realize multiple manipulation of droplets
Researchers realize multiple manipulation of droplets
Droplet manipulation is critical for a wide variety of applications, such as drug delivery, heat management, and bioassay. Although methods for droplet directional movement have been well studied, the multiple manipulation of droplets is still challenging.
Recently, a research group from Institute of Chemistry of Chinese Academy of Science (ICCAS), led by Prof. SONG Yanlin, reported a magnetic-actuated robot for droplet multiple manipulation. The droplet could be transported, split, released and rotated for universal applications in various fields and rough environments.
The magnetic-actuated robot consists of two steel beads and a magnetic control system. The movement and the center-to-center distance of the beads can be manipulated by the magnetic control system. Researchers proved that the resistance of droplet movement could be redistributed by changing the center-to-center distance of the beads, thus achieving different droplet behaviors. They found the droplet transport was achieved with moderate center-to-center distance, drop split occurred at a reduced center-to-center distance, while increasing the center-to-center distance contributed to the droplet release.
In addition to control the water droplet in the air, researchers investigated the generality of the robot at different environments. They demonstrated that the robot could manipulate different fluids in various liquids, such as manipulate water droplet under oil, manipulate oil droplet under water, and manipulate bubbles under water. Furthermore, this robot could drag a water droplet to move on upright surface by overcoming the gravity. Moreover, it could manipulate droplets in limited spaces such as boxes and tubes. This study achieved multiple and complex manipulation of droplets for the first time, which has significant potential in the fields of device fabrication, microfluidics, and in vivo medicine.
The paper entitled “Programmable droplet manipulation by a magnetic-actuated robot” was published in Science Advances (DOI: 10.1126/sciadv.aay5808).
The research was financially supported by the National Key Research and Development Program of China, National Natural Science Foundation of China, Postdoctoral Innovative Talents Support Program, China Postdoctoral Science Foundation and K. C. Wong Education Foundation.
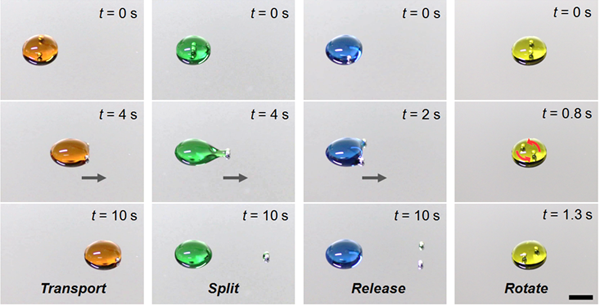
Typical behaviors of water droplets manipulated by the magnetic-actuated robot (Image by Prof. SONG’ group)
Contact:
Prof. SONG Yanlin
Institute of Chemistry, Chinese Academy of Sciences
Email: ylsong@iccas.ac.cn